1/1





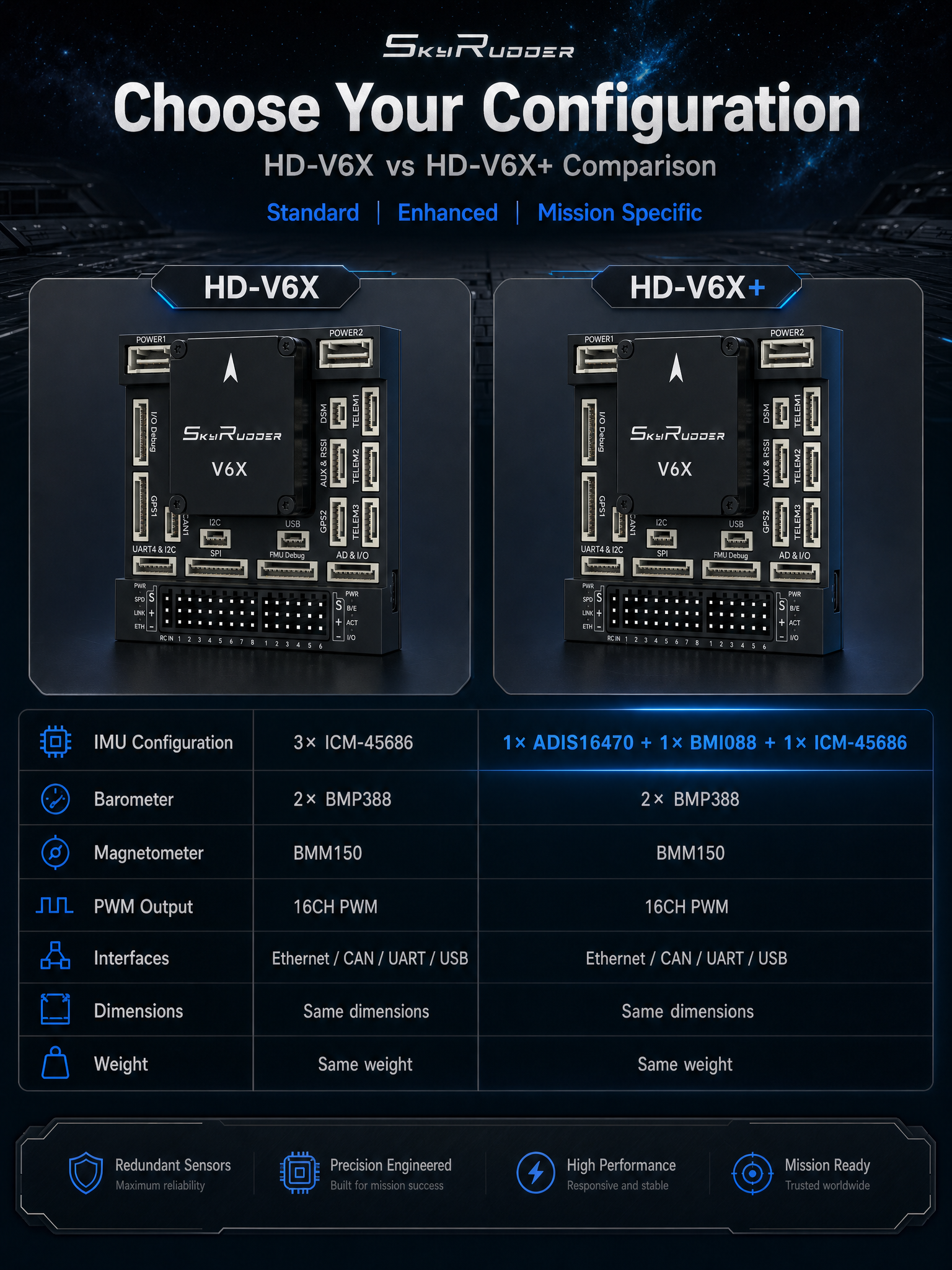
Haizhi Sky Rudder HD-V6X Industrial Flight Controller PX4 V6X STM32H753 IMU Triple Redundancy Autopilot
SKU: HDDPHDV6X001
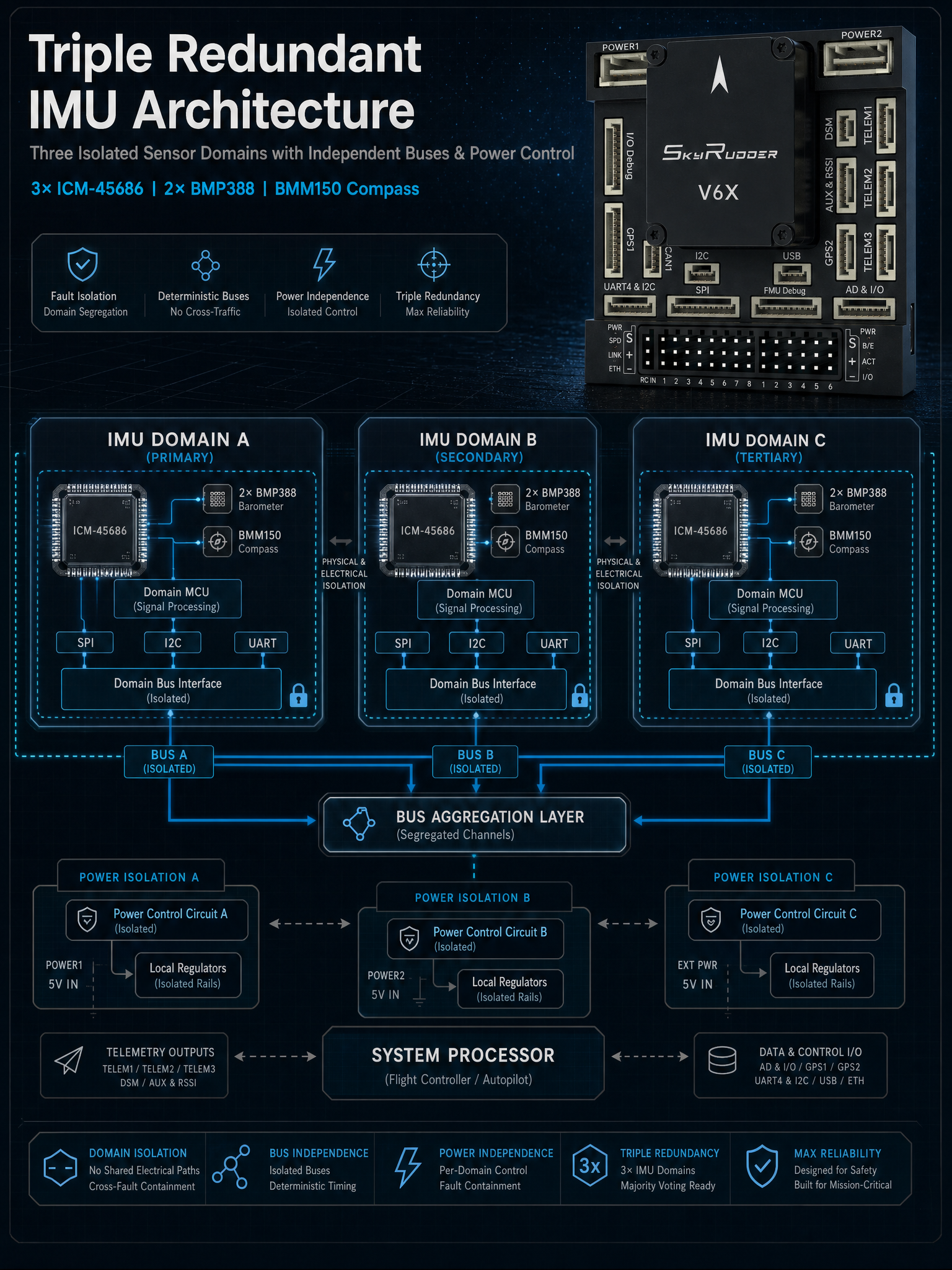
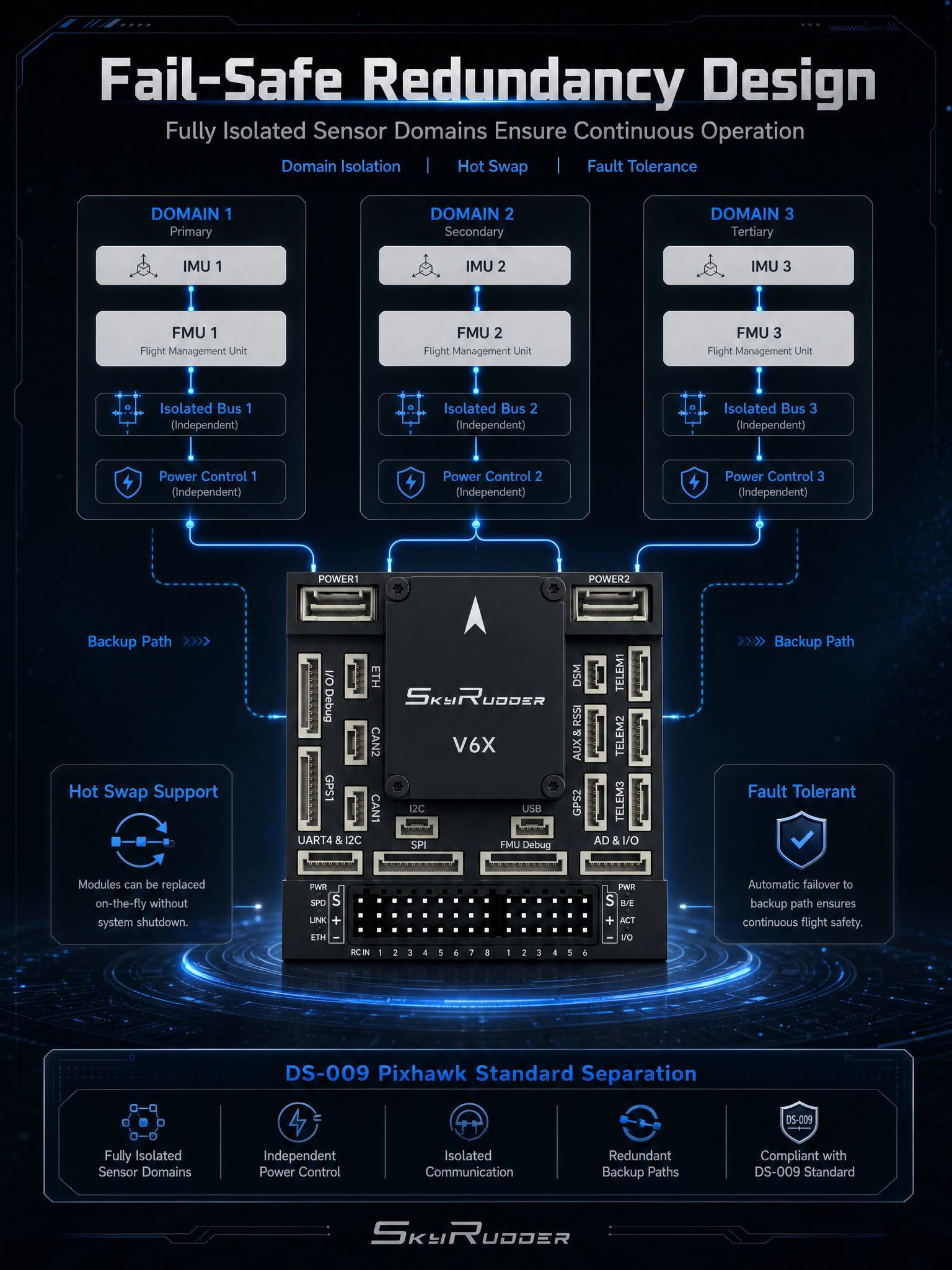
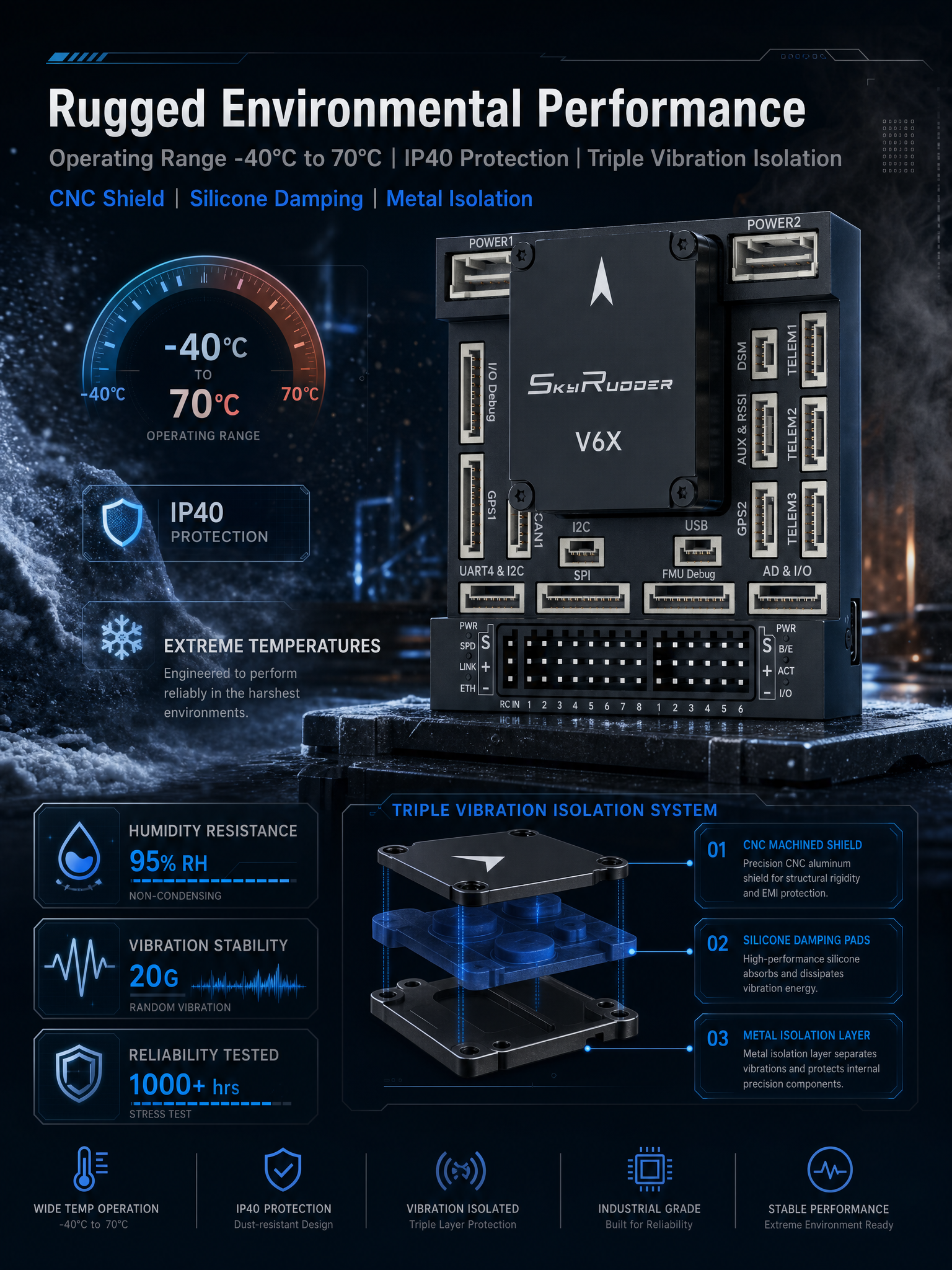
Haizhi Sky Rudder HD-V6X industrial flight controller with PX4 V6X standard, STM32H753 MCU, triple IMU redundancy, Ethernet high-speed datalink. Compatible with multi-rotor, fixed-wing, and USV/UGV.
(0 Reviews)
$1,899.00
1/1