1/1




YDLIDAR X3 Lidar Sensor - 8 Meter, 360°,TOF, Robot ROS teaching and research
SKU: EAIDPX30001
Feature
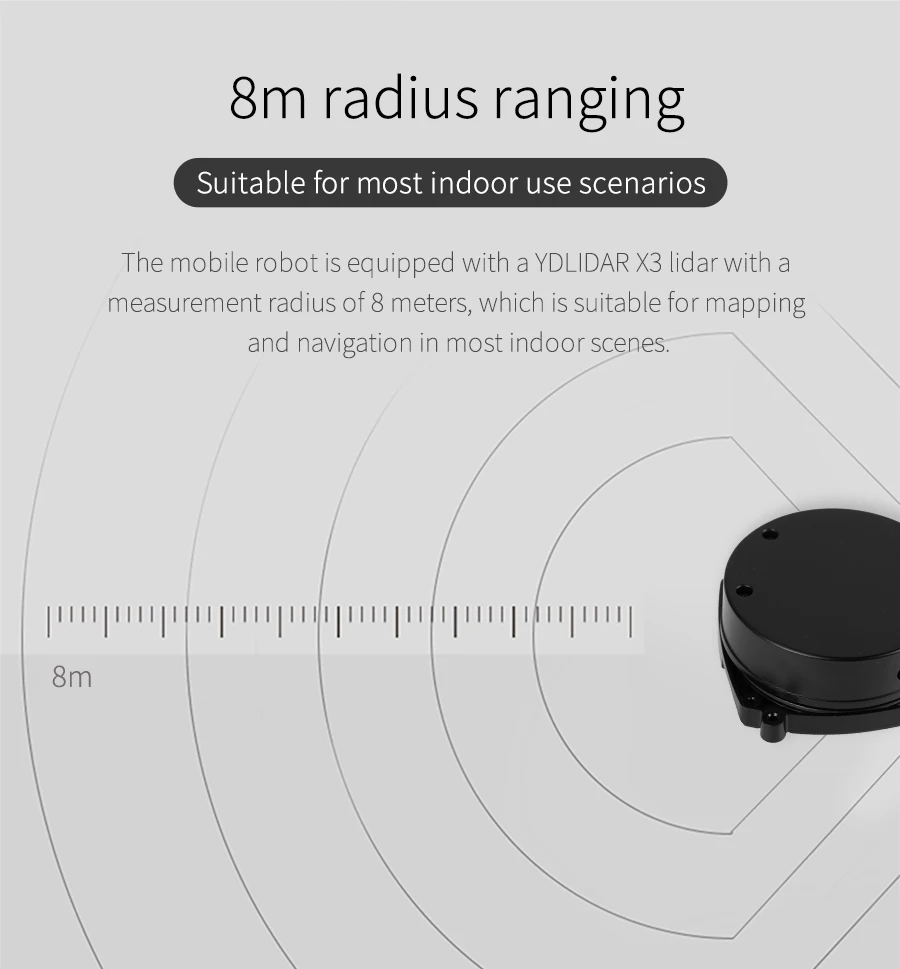
Ranging range is 8 meters, suitable for indoor projects.
Sampling frequency is 3000 times/s, it can adjust scanning frequency automatically.
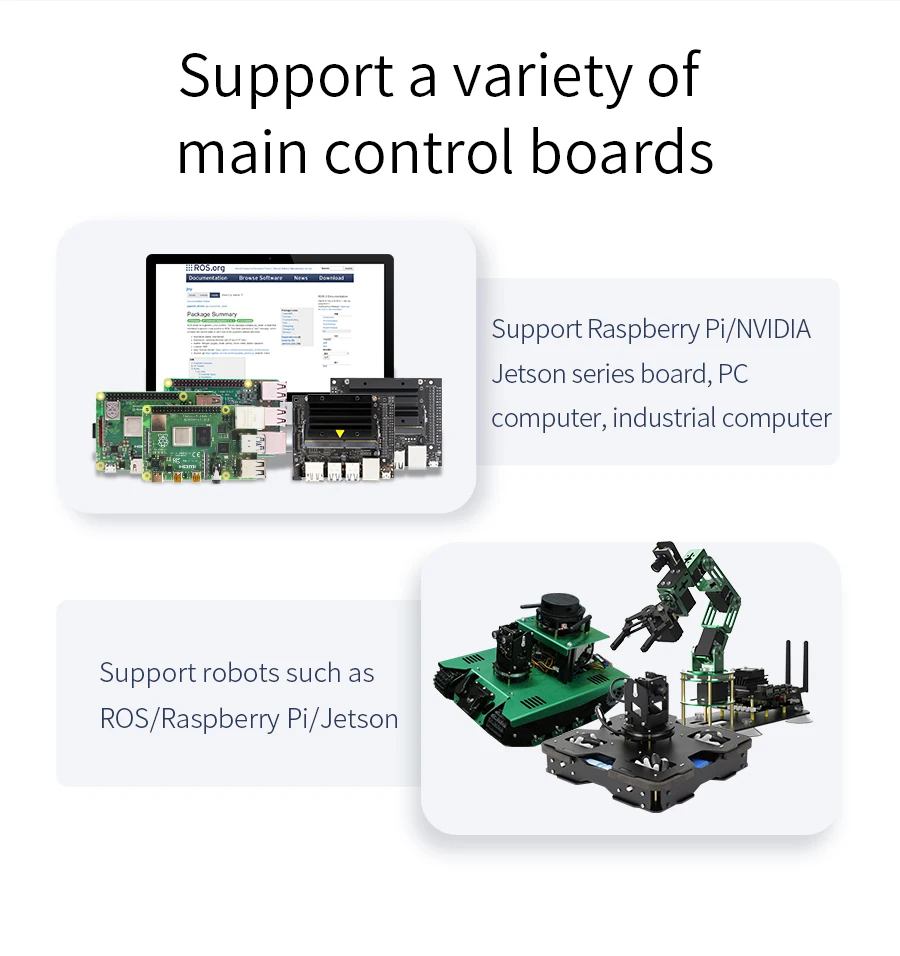
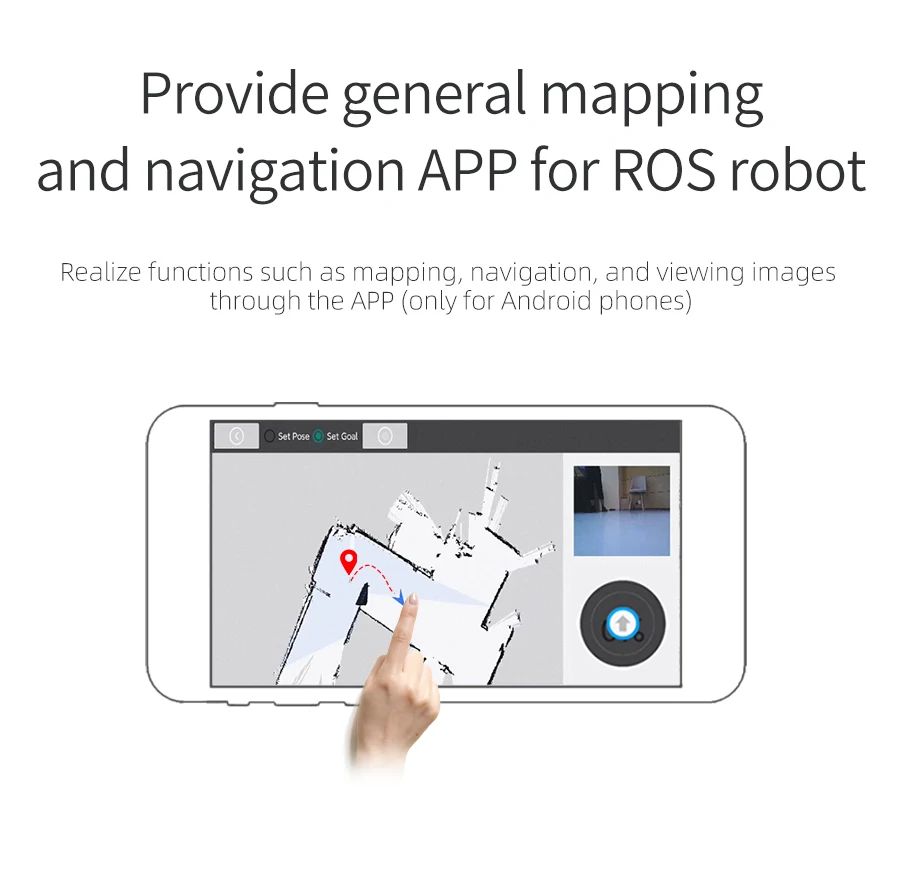
Can be used for ROS educational robots, open source hardware, UAV mapping and obstacle avoidance, synchronous positioning and navigation.
Ranging range is 8 meters, suitable for indoor projects.
Sampling frequency is 3000 times/s, it can adjust scanning frequency automatically.
Can be used for ROS educational robots, open source hardware, UAV mapping and obstacle avoidance, synchronous positioning and navigation.
(1 Reviews)
$461.50
1/1









 ?
?