1/1








Sipeed MaixSense RGBD TOF 3D Depth Vision - MCU & MINI ROS Camera - Support ROS1 / ROS2 iTOF,Global shutter - A010 A075V
SKU: SPDPA0100003
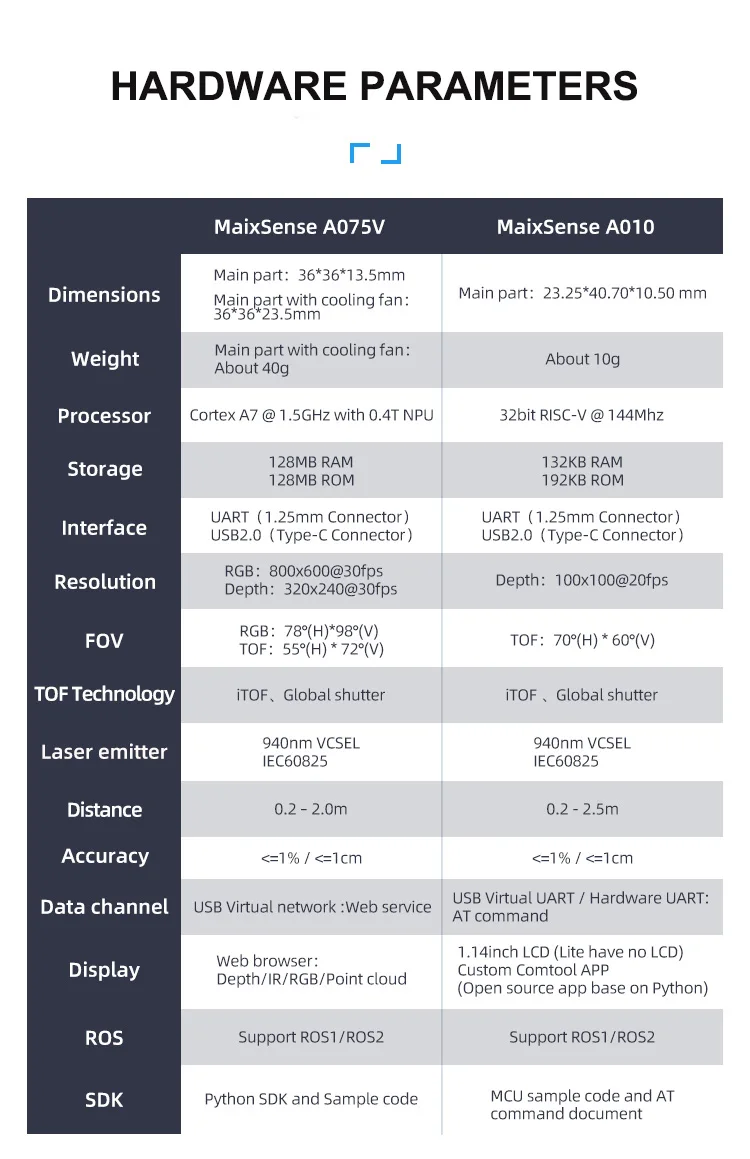
MaixSense series products are equipped with TOF depth cameras, currently, there are two products: MaixSense-A010 and MaixSense-A075V.
(1 Reviews)
$177.50
1/1